




Deux possibilités de combinaison désherbage chimique/mécanique
1) Le désherbage mécanique sur le rang
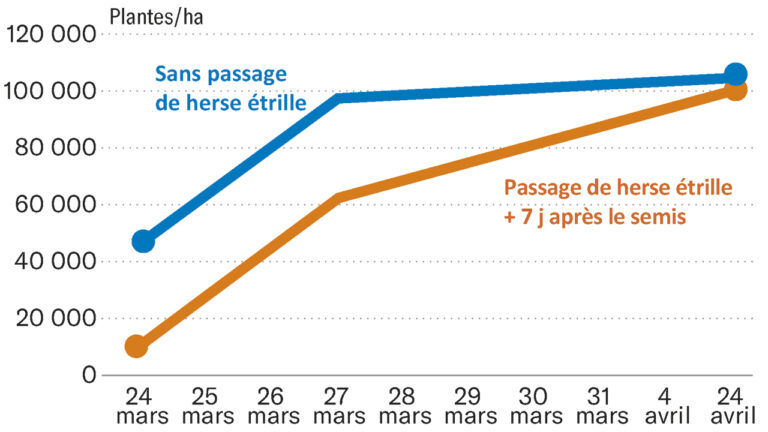
Après deux à trois traitements de post-émergence et à partir du stade 4 feuilles de la betterave, il est possible d’intervenir sur le rang et l’inter-rang avec des matériels spécifiques (houe rotative, herse étrille, bineuse équipée de moulinets). Ces passages exigent un sol suffisamment sec et bien nivelé pour une destruction efficace des adventices, ce qui doit être anticipé dès l’étape de préparation du sol avant semis. La précision de réglage de l’outil est également déterminante dans la réussite de l’opération, il est important de faire des tests pour trouver le bon ajustement avant de généraliser sur toute la parcelle. Pour la herse étrille, la pression de ressort sur les dents doit être réglée de manière à ne pas endommager les betteraves, tout en étant assez résistante pour déraciner les adventices. L’efficacité des machines sur le rang est bonne jusqu’au stade cotylédons des adventices, mais peut baisser rapidement pour des stades plus avancés.
2) Binage de l’inter-rang et localisation des herbicides sur le rang
Les rampes de localisation ou des buses/porte-buses spécifiques permettent de réaliser les traitements herbicides uniquement sur le rang de betteraves, puis de travailler l’inter-rang mécaniquement avec une bineuse. Les traitements sont effectués avec les mêmes produits, les mêmes doses rapportées à la surface traitée et aux mêmes stades d’intervention que les traitements généralisés conventionnels. Cette technique combinatoire permet une forte baisse de l’IFT (- 50 % à – 66 % de la surface traitée).
Utiliser des technologies robotisées pour affiner le désherbage mécanique
Les nouvelles technologies permettent désormais un désherbage mécanique de précision. Qu’il s’agisse de matériels autonomes ou d’outils attelés derrière le tracteur, ces technologies robotisées répondent aux impasses techniques soulevées par le matériel de désherbage mécanique classique. Elles sont notamment capables de biner avec précision sur le rang entre les betteraves. Ces machines peuvent prendre en charge seulement le désherbage ou des tâches supplémentaires (par exemple : le semis en amont, dans le cas du robot Farmdroid). Comme pour le matériel de désherbage mécanique classique, le fonctionnement de ces technologies nécessite des conditions sèches et, du fait de leur faible débit de chantier (ces machines fonctionnent en général à moins d’1km/h), elles sont dépendantes de fenêtres météo élargies. La combinaison avec le désherbage chimique est possible, attention toutefois à ne pas créer d’ornière trop profonde avec le passage du pulvérisateur, ces déformations pouvant nuire par la suite à la précision de travail du robot.
Sur le même thème

Les stratégies de désherbage combiné
En plus de la pulvérisation en bande, une autre alternative à la pulvérisation en plein existe aujourd’hui : la pulvérisation de précision, qui consiste à pulvériser uniquement sur des adventices détectées. Cette technique sous-entend la présence d’un dispositif de reconnaissance (caméras sur la rampe de pulvérisation) et de technologies d’application spécifiques (buses PWM par exemple). Le nombre d’organes de détection, de buses et leur espacement déterminera la précision de la détection et de l’application. Cette technologie peut être utilisée spécifiquement pour cibler une adventice précise (par exemple les chardons), ou peut concerner toutes les adventices de la parcelle, en sachant que les plus petites ne seront pas forcément détectées (et donc non-traitées).
En fonction de l’infestation de la parcelle, cette méthode pourrait permettre de réduire significativement l’IFT.






